
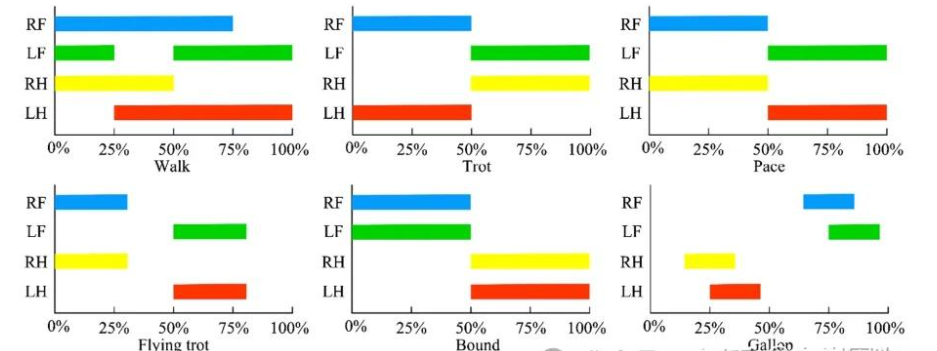
这里写下四足机器人的运动控制步态:
声明:小猿资源站是一个资源分享和技术交流平台,本站所发布的一切破解补丁、注册机和注册信息及软件的解密分析文章仅限用于学习和研究目的;不得将上述内容用于商业或者非法用途,否则,一切后果请用户自负。本站信息来自网络,版权争议与本站无关。您必须在下载后的24个小时之内,从您的电脑中彻底删除上述内容。如果您喜欢该程序,请支持正版软件,购买注册,得到更好的正版服务。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理。

这里写下四足机器人的运动控制步态:
